Evaluates sum of absolute transformed differences between current and reference 8X8 blocks using 8x8 transform.
Syntax
IppStatus ippiSAT8x8D_8u32s_C1R(const Ipp8u* pSrcCur, int srcCurStep, const Ipp8u* pSrcRef, int srcRefStep, Ipp32s* pSATD);
IppStatus ippiSAT8x8D_16u32s_C1R(const Ipp16u* pSrcCur, int srcCurStep, const Ipp16u* pSrcRef, int srcRefStep, Ipp32s* pSATD);
Parameters
pSrcCur |
Pointer to an 8x8 block in the source plane. |
srcCurStep |
Distance in bytes between starts of the consecutive lines in the source image. |
pSrcRef |
Pointer to an 8x8 block in the reference plane. |
scrRefStep |
Distance in bytes between starts of the consecutive lines in the reference image. |
pSATD |
Pointer to the SATD value. |
Description
This function is declared in the ippvc.h header file. The functions ippiSAT8x8D_8u32s_C1R and ippiSAT8x8D_16u32s_C1R evaluate the sum of absolute tranformed differences of all the elements in the current 8x8 block and the corresponding elements in the reference 8x8 block using an 8x8 transform. The transform matrix is as follows:
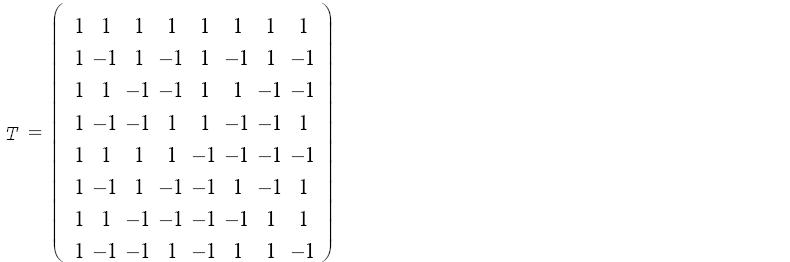
If D is a 8x8 block of difference, the result of the function is the sum of absolute values of elements of T *D*T. The result is stored in pSATD.
This function is used in the H.264 encoder included into Intel IPP Samples. See introduction to Motion Estimation.
Return Values
ippStsNoErr |
Indicates no error. |
ippStsNullPtrErr |
Indicates an error when at least one input pointer is NULL. |